Determinante
In der linearen Algebra ist die Determinante eine Zahl (ein Skalar), die einer quadratischen Matrix zugeordnet wird und aus ihren Einträgen berechnet werden kann. Sie gibt an, wie sich das Volumen bei der durch die Matrix beschriebenen linearen Abbildung ändert, und ist ein nützliches Hilfsmittel bei der Lösung linearer Gleichungssysteme. Allgemeiner kann man jeder linearen Selbstabbildung (Endomorphismus) eine Determinante zuordnen. Übliche Schreibweisen für die Determinante einer quadratischen Matrix sind , oder .





Zum Beispiel kann die Determinante einer -Matrix


mit der Formel

berechnet werden.
Mit Hilfe von Determinanten kann man beispielsweise feststellen, ob ein lineares Gleichungssystem eindeutig lösbar ist, und kann die Lösung mit Hilfe der Cramerschen Regel explizit angeben. Das Gleichungssystem ist genau dann eindeutig lösbar, wenn die Determinante der Koeffizientenmatrix ungleich null ist. Entsprechend ist eine quadratische Matrix mit Einträgen aus einem Körper genau dann invertierbar, wenn ihre Determinante ungleich null ist.
Schreibt man Vektoren im als Spalten einer quadratischen Matrix, so kann die Determinante dieser Matrix gebildet werden. Bilden bei dieser Festlegung die Vektoren eine Basis, so kann das Vorzeichen der Determinante dazu verwendet werden, die Orientierung von euklidischen Räumen zu definieren. Der Absolutbetrag dieser Determinante entspricht zugleich dem Volumen des n-Parallelotops (auch Spat genannt), das durch diese Vektoren aufgespannt wird.


Wird die lineare Abbildung durch die Matrix repräsentiert und ist eine beliebige messbare Teilmenge, dann folgt, dass das Volumen von durch gegeben ist.




Wird die lineare Abbildung durch die -Matrix repräsentiert und ist eine beliebige messbare Teilmenge, so gilt im Allgemeinen, dass das -dimensionale Volumen von durch gegeben ist, siehe Gramsche Determinante.




Das Konzept der Determinante ist von Interesse für -Matrizen mit . Für verkommt es zur Trivialität : So besteht ein lineares Gleichungssystem für den Fall aus einer Gleichung . Lösbarkeitskriterium und -strategie für diese Gleichung sind bekannt: Falls , setze .







Definition
BearbeitenEs gibt mehrere Möglichkeiten, die Determinante zu definieren (s. unten). Die gebräuchlichste ist die folgende rekursive Definition.
Entwicklung der Determinante nach einer Spalte oder Zeile:
Für n = 2:

Für n = 3: Entwicklung nach der 1. Spalte


Entsprechend für n = 4, …
Der Laplacesche Entwicklungssatz (s. unten) sagt:
- Man darf eine Determinante nach einer beliebigen Spalte oder Zeile entwickeln, solange man das schachbrettartige Vorzeichenmuster einhält:

Formal lässt sich das so schreiben:
- (Entwicklung nach der -ten Spalte)
- (Entwicklung nach der -ten Zeile),




wobei die -Untermatrix von ist, die durch Streichen der -ten Zeile und -ten Spalte entsteht.


Beispiel:


Eigenschaften (Zusammenfassung, s. unten)
Bearbeiten- für Einheitsmatrix
- , wobei die transponierte Matrix von ist.
- Für quadratische Matrizen und gleicher Größe gilt der Determinantenmultiplikationssatz:
- .
- für eine Matrix und eine Zahl .
- Für eine Dreiecksmatrix gilt .
- Besteht eine Reihe oder Spalte aus Nullen, ist die Determinante 0.
- Sind zwei Spalten (Zeilen) gleich, ist die Determinante 0.
- Vertauscht man zwei Spalten (Zeilen), so ändert eine Determinante ihr Vorzeichen.
- Sind die Spaltenvektoren (Zeilenvektoren) einer Matrix und eine Zahl, so gelten:
- a1) ,
- a2) ,
- entsprechend für die anderen Spaltenvektoren (Zeilenvektoren).
- b) ist das (orientierte) Volumen (Flächeninhalt im Fall n = 2) des von den Vektoren aufgespannten Polytopes (Parallelogramm).
- Addition eines Vielfachen einer Spalte (Zeile) zu einer anderen Spalte (Zeile) ändert eine Determinante nicht. Man kann also eine Determinante mit einem abgeschwächten Gauß-Algorithmus zu einer Dreiecksmatrix umformen und Eigenschaft 6 zur Berechnung der Determinante verwenden. Man beachte Eigenschaften 9 und 10.a2).
- Nur für -Determinanten gilt die Regel von Sarrus:
















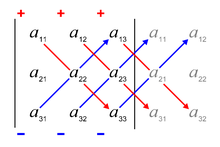
Regel von Sarrus

Beispiel, Anwendung der Regeln 11, 10, 8:

Axiomatische Beschreibung
BearbeitenEine Abbildung vom Raum der quadratischen Matrizen in den zugrunde liegenden Körper bildet jede Matrix auf ihre Determinante ab, wenn sie folgende drei Eigenschaften (Axiome nach Karl Weierstraß)[1] erfüllt, wobei eine quadratische Matrix spaltenweise als geschrieben wird:



- Sie ist multilinear, d. h. linear in jeder Spalte:
- Für alle gilt:
- Für alle und alle gilt:





- Sie ist alternierend, d. h., wenn in zwei Spalten das gleiche Argument steht, ist die Determinante gleich 0:
- Für alle und alle gilt:
- Hieraus folgt, dass sich das Vorzeichen ändert, wenn man zwei Spalten vertauscht:
- Für alle und alle gilt:
- Oft wird diese Folgerung zur Definition von alternierend verwendet. Im Allgemeinen ist diese jedoch nicht zur obigen äquivalent. Wird alternierend nämlich auf die zweite Weise definiert, gibt es keine eindeutige Determinantenform, wenn der Körper, über dem der Vektorraum gebildet wird, ein von 0 verschiedenes Element mit besitzt (Charakteristik 2).





- Sie ist normiert, d. h., die Einheitsmatrix hat die Determinante 1:

Es lässt sich beweisen (und Karl Weierstraß hat dies 1864 oder sogar früher getan),[2] dass es eine und nur eine solche normierte alternierende Multilinearform auf der Algebra der -Matrizen über dem zugrundeliegenden Körper gibt – nämlich diese Determinantenfunktion (Weierstraßsche Determinantenkennzeichnung).[3] Auch die schon erwähnte geometrische Interpretation (Volumeneigenschaft und Orientierung) folgt daraus.

Leibniz-Formel
BearbeitenFür eine -Matrix wurde die Determinante von Gottfried Wilhelm Leibniz durch die heute als Leibniz-Formel bekannte Formel für die Determinante einer Matrix definiert:


Die Summe wird über alle Permutationen der symmetrischen Gruppe vom Grad n berechnet. bezeichnet das Signum der Permutation (+1, falls eine gerade Permutation ist, und −1, falls sie ungerade ist) und ist der Funktionswert der Permutation an der Stelle .




Beispielhaft für eine -Matrix:

Für enthält die symmetrische Gruppe alle Permutationen, in welchen die Zahlen 1, 2 und 3 angeordnet werden können: .




Für jede dieser Permutationen wird die Parität berechnet, welche negativ ist, wenn die Anzahl ihrer Fehlstände ungerade ist, und positiv, wenn nicht.
Dann wird das Produkt der Einträge der Matrix von berechnet, wobei
der erste Index , der zweite Index die Zahl ist, auf den der -te Eintrag der Permutation abbildet.

Für die Permutation ergibt das .


Für die Permutation ergibt das .


Für die Permutation ergibt das .


Für die Permutation ergibt das .


Für die Permutation ergibt das .


Für die Permutation ergibt das .


Die Summe dieser Terme ergibt dann die Determinante der -Matrix:

Durch eine Umordnung der Terme wird ersichtlich, dass dies für eine -Matrix äquivalent mit der Regel von Sarrus ist:

Die Leibniz-Formel enthält Summanden und wird deshalb schnell umso unhandlicher, je größer ist. Sie eignet sich jedoch gut zum Beweis von Aussagen über Determinanten. Beispielsweise ist mit ihrer Hilfe die Stetigkeit der Determinantenfunktion ersichtlich.

Eine alternative Schreibweise der Leibniz-Formel verwendet das Levi-Civita-Symbol und die Einsteinsche Summenkonvention:

Determinante eines Endomorphismus
BearbeitenDa ähnliche Matrizen die gleiche Determinante haben, kann man die Definition der Determinante von quadratischen Matrizen auf die durch diese Matrizen dargestellten linearen Selbstabbildungen (Endomorphismen) übertragen:
Die Determinante einer linearen Abbildung eines Vektorraums in sich ist die Determinante einer Darstellungsmatrix von bezüglich einer Basis von . Sie ist unabhängig von der Wahl der Basis.




Hierbei kann ein beliebiger endlichdimensionaler Vektorraum über einem beliebigen Körper sein. Allgemeiner kann man auch einen kommutativen Ring mit Einselement und einen freien Modul vom Rang über betrachten.
Die Definition lässt sich ohne Verwendung von Matrizen folgendermaßen formulieren: Es sei eine Determinantenfunktion. Dann ist bestimmt durch , wobei der Rücktransport von Multilinearformen durch ist. Es sei eine Basis von . Dann gilt:





Es ist unabhängig von der Wahl von und der Basis. Geometrisch interpretiert erhält man das Volumen des von aufgespannten Spates, indem man das Volumen des von aufgespannten Spates mit dem Faktor multipliziert.


Eine alternative Definition ist die folgende: Es sei die Dimension von und die -te äußere Potenz von . Dann gibt es eine eindeutig bestimmte lineare Abbildung , die durch



festgelegt ist. (Diese Abbildung ergibt sich durch universelle Konstruktion als Fortsetzung von auf die äußere Algebra , eingeschränkt auf die Komponente vom Grad .)


Da der Vektorraum eindimensional ist, ist einfach nur die Multiplikation mit einem Körperelement. Dieses Körperelement ist . Es gilt also
- .

Weitere Möglichkeiten zur Berechnung
BearbeitenSpatprodukt
BearbeitenLiegt eine -Matrix vor, lässt sich deren Determinante auch über das Spatprodukt berechnen.
Gaußsches Eliminationsverfahren zur Determinantenberechnung
BearbeitenAllgemein können Determinanten mit dem Gaußschen Eliminationsverfahren unter Verwendung der folgenden Regeln berechnet werden:
- Ist eine Dreiecksmatrix, dann ist das Produkt der Hauptdiagonalelemente die Determinante von .
- Falls sich aus ergibt, indem man zwei Zeilen oder Spalten vertauscht, dann ist .
- Falls sich aus ergibt, indem man ein Vielfaches einer Zeile oder Spalte zu einer anderen Zeile oder Spalte addiert, dann ist .
- Falls sich aus ergibt, indem man das -Fache einer Zeile oder Spalte bildet, dann ist .



Beginnend mit einer beliebigen quadratischen Matrix benutzt man die letzten drei dieser vier Regeln, um die Matrix in eine obere Dreiecksmatrix zu überführen, und berechnet dann die Determinante als Produkt der Diagonalelemente.
Auf diesem Prinzip basiert auch die Determinantenberechnung mittels der LR-Zerlegung. Da sowohl als auch Dreiecksmatrizen sind, ergeben sich ihre Determinanten aus dem Produkt der Diagonalelemente, die bei alle auf 1 normiert sind. Gemäß dem Determinantenproduktsatz ergibt sich die Determinante damit aus dem Zusammenhang



Laplacescher Entwicklungssatz
BearbeitenMit dem Laplaceschen Entwicklungssatz kann man die Determinante einer -Matrix „nach einer Zeile oder Spalte entwickeln“. Die beiden Formeln lauten
- (Entwicklung nach der -ten Spalte)
- (Entwicklung nach der -ten Zeile),
wobei die -Untermatrix von ist, die durch Streichen der -ten Zeile und -ten Spalte entsteht. Das Produkt wird Cofaktor genannt.


Genau genommen gibt der Entwicklungssatz nur ein Verfahren an, die Summanden der Leibniz-Formel in einer bestimmten Reihenfolge zu berechnen. Dabei wird die Determinante bei jeder Anwendung um eine Dimension reduziert. Falls gewünscht, kann das Verfahren so lange angewandt werden, bis sich ein Skalar ergibt (s. oben).
Der laplacesche Entwicklungssatz lässt sich auf folgende Weise verallgemeinern. Statt nur nach einer Zeile oder Spalte kann man auch nach mehreren Zeilen oder Spalten entwickeln. Die Formel dafür lautet

mit den folgenden Bezeichnungen: und sind Teilmengen von und ist die Untermatrix von , die aus den Zeilen mit den Indizes aus und den Spalten mit den Indizes aus besteht. und bezeichnen die Komplemente von und . ist die Summe der Indizes aus . Für die Entwicklung nach den Zeilen mit den Indizes aus läuft die Summe über alle , wobei die Anzahl dieser Spaltenindizes gleich der Anzahl der Zeilen ist, nach denen entwickelt wird. Für die Entwicklung nach den Spalten mit den Indizes aus läuft die Summe über . Die Anzahl der Summanden ergibt sich als der Binomialkoeffizient mit .












Effizienz:
Der Aufwand für die Berechnung nach dem laplaceschen Entwicklungssatz für eine Matrix der Dimension ist von der Ordnung , während die üblichen Verfahren nur von sind und teilweise noch besser (siehe beispielsweise Strassen-Algorithmus) gestaltet werden können. Dennoch kann der laplacesche Entwicklungssatz bei kleinen Matrizen und Matrizen mit vielen Nullen gut angewendet werden.


Determinanten von Dyaden
BearbeitenDyaden sind Matrizen, die durch das dyadische Produkt „⊗“ von zwei Vektoren gebildet werden. Jede Matrix lässt sich als Summe solcher Dyaden darstellen. Werden die Vektoren aus der Standardbasis des entnommen, entsteht die Darstellung


für eine n×n-Matrix . Statt der Standardbasis kann aber auch jede andere Vektorraumbasis oder des benutzt werden:



Die Determinante dieser Matrix berechnet sich zu
- .

Hier wurden die Vektoren bzw. spaltenweise in Matrizen eingelagert, was statthaft ist, weil sich die Determinante durch Transposition nicht ändert.


Denn mit dem Standardskalarprodukt „·“ ist
- ,

woraus obiges Ergebnis aus dem #Determinantenproduktsatz folgt.
Weitere Eigenschaften
BearbeitenDeterminantenproduktsatz
BearbeitenDie Determinante ist eine multiplikative Abbildung in dem Sinne, dass
- für alle -Matrizen und .

Das bedeutet, dass die Abbildung ein Gruppenhomomorphismus von der allgemeinen linearen Gruppe in die Einheitengruppe des Körpers ist. Der Kern dieser Abbildung ist die spezielle lineare Gruppe.


Allgemeiner gilt für die Determinante einer quadratischen Matrix, die das Produkt zweier (nicht notwendig quadratischer) Matrizen ist, der Satz von Binet-Cauchy. Noch allgemeiner ergibt sich als unmittelbare Folgerung aus dem Satz von Binet-Cauchy eine Formel für die Berechnung eines Minors der Ordnung eines Produktes zweier Matrizen. Ist eine -Matrix und eine -Matrix und ist und mit , dann gilt mit den Bezeichnungen wie beim verallgemeinerten Entwicklungssatz






Der Fall liefert den Satz von Binet-Cauchy (der für zum gewöhnlichen Determinantenproduktsatz wird) und der Spezialfall liefert die Formel für die gewöhnliche Matrizenmultiplikation.



Existenz der inversen Matrix
BearbeitenEine Matrix ist genau dann invertierbar (also regulär), falls eine Einheit des zugrundeliegenden Ringes ist (das heißt für Körper). Falls invertierbar ist, dann gilt für die Determinante der Inversen .


Ähnliche Matrizen
BearbeitenFalls und ähnlich sind, das heißt, falls eine invertierbare Matrix existiert, sodass , dann stimmen ihre Determinanten überein, denn


- .

Deswegen kann man unabhängig von einer Koordinatendarstellung die Determinante einer linearen Selbstabbildung definieren (wobei ein endlichdimensionaler Vektorraum ist), indem man eine Basis für wählt, die Abbildung durch eine Matrix relativ zu dieser Basis beschreibt und die Determinante dieser Matrix nimmt. Das Ergebnis ist unabhängig von der gewählten Basis.
Es gibt Matrizen, die die gleiche Determinante haben, aber nicht ähnlich sind.
Blockmatrizen
BearbeitenFür die Determinante einer -Blockmatrix


mit quadratischen Blöcken und kann man unter gewissen Voraussetzungen Formeln angeben, welche die Blockstruktur ausnutzen. Für oder folgt aus dem verallgemeinerten Entwicklungssatz:



- .

Diese Formel wird auch Kästchensatz genannt.[4]
Ist invertierbar, so folgt aus der Zerlegung

die Formel

Wenn invertierbar ist, so lässt sich formulieren:

Im Spezialfall, dass alle vier Blöcke die gleiche Größe haben und paarweise kommutieren, ergibt sich daraus mit Hilfe des Determinantenproduktsatzes

Dabei bezeichne einen kommutativen Unterring des Ringes aller -Matrizen mit Einträgen aus dem Körper , sodass (zum Beispiel den von diesen vier Matrizen erzeugten Unterring), und sei die entsprechende Abbildung, die einer quadratischen Matrix mit Einträgen aus ihre Determinante zuordnet. Diese Formel gilt auch, falls A nicht invertierbar ist, und verallgemeinert sich für Matrizen aus .[6]




Eigenwerte und charakteristisches Polynom
BearbeitenIst das charakteristische Polynom der -Matrix
- ,


so ist die Determinante von .

Zerfällt das charakteristische Polynom in Linearfaktoren (mit nicht notwendigerweise verschiedenen ):

- ,

so ist insbesondere
- .

Sind die verschiedenen Eigenwerte der Matrix mit -dimensionalen verallgemeinerten Eigenräumen, so ist


- .

Stetigkeit und Differenzierbarkeit
BearbeitenDie Determinante von reellen ( ) oder komplexen ( quadratischen Matrizen fester Dimension ist eine Polynomfunktion , was direkt aus der Leibniz-Formel folgt. Als solche ist sie überall stetig und differenzierbar. Ihr totales Differential an der Stelle kann mit Hilfe von Jacobis Formel dargestellt werden:





wobei die zu komplementäre Matrix und die Spur einer Matrix bezeichnet. Insbesondere ergibt sich für invertierbares , dass



oder als Näherungsformel

falls die Werte der Matrix hinreichend klein sind. Der Spezialfall, wenn gleich der Einheitsmatrix ist, ergibt


Alternativ lassen sich auch die partiellen Ableitungen von nach den Einträgen der Matrix definieren gemäß


- für


wobei die Kofaktormatrix ist und die letzte Darstellung wiederum nur für invertierbare gilt. Partielle Ableitungen von Determinanten findet man vor allem in Physiklehrbüchern (z. B. zur Elastizitätstheorie).

Permanente
BearbeitenDie Permanente ist ein „vorzeichenloses“ Analogon zur Determinante, wird allerdings viel seltener verwendet.
Verallgemeinerung
BearbeitenDie Determinante kann auch auf Matrizen mit Einträgen in einem kommutativen Ring mit Eins definiert werden. Dies erfolgt mit Hilfe einer gewissen antisymmetrischen multilinearen Abbildung: Falls ein kommutativer Ring ist und der -dimensionale freie -Modul, dann sei


die eindeutig bestimmte Abbildung mit den folgenden Eigenschaften:
- ist -linear in jedem der Argumente.
- ist antisymmetrisch, d. h., falls zwei der Argumente gleich sind, so liefert Null.
- , wobei das Element von ist, das eine 1 als -te Koordinate hat und sonst Nullen.



Eine Abbildung mit den ersten beiden Eigenschaften wird auch als Determinantenfunktion, Volumen oder alternierende -Linearform bezeichnet. Man erhält die Determinante, indem man auf natürliche Weise mit dem Raum der quadratischen Matrizen identifiziert:



Spezielle Determinanten
Bearbeiten- Determinante (Knotentheorie)
- Funktionaldeterminante (auch Jacobi-Determinante genannt)
- Gramsche Determinante
- Pfaffsche Determinante
- Smithsche Determinante
- Vandermonde-Determinante
- Wronski-Determinante
Geschichte
BearbeitenHistorisch hängen Determinanten (lat. determinare „abgrenzen“, „bestimmen“) und Matrizen sehr eng zusammen, was auch nach unserem heutigen Verständnis noch so ist. Allerdings wurde der Begriff der Matrix erst über 200 Jahre nach den ersten Überlegungen zu Determinanten geprägt. Ursprünglich wurde eine Determinante im Zusammenhang mit linearen Gleichungssystemen betrachtet. Die Determinante „determiniert“, ob das Gleichungssystem eine eindeutige Lösung besitzt (dies ist genau dann der Fall, wenn die Determinante ungleich null ist). Die ersten Betrachtungen dieser Art für -Matrizen wurden von Gerolamo Cardano Ende des 16. Jahrhunderts durchgeführt. Zirka hundert Jahre später studierten Gottfried Wilhelm Leibniz und Seki Takakazu unabhängig voneinander Determinanten größerer linearer Gleichungssysteme.[7] Seki, der mittels Determinanten versuchte, schematische Lösungsformeln für Gleichungssysteme anzugeben, fand für den Fall von drei Unbekannten eine Vorschrift, die der späteren sarrusschen Regel entsprach.[8]
Im 18. Jahrhundert wurden Determinanten ein fester Bestandteil der Technik zum Lösen linearer Gleichungssysteme. Im Zusammenhang mit seinen Studien zu Schnittpunkten zweier algebraischer Kurven berechnete Gabriel Cramer die Koeffizienten eines allgemeinen Kegelschnitts

der durch fünf vorgegebene Punkte verläuft, und stellte dabei die heute nach ihm benannte Cramersche Regel auf. Für Gleichungssysteme mit bis zu vier Unbekannten trat diese Formel schon bei Colin Maclaurin auf.[8]
Mehrere bekannte Mathematiker wie Étienne Bézout, Leonhard Euler, Joseph-Louis Lagrange und Pierre-Simon Laplace befassten sich nun vor allem mit der Berechnung von Determinanten. Einen wichtigen Fortschritt in der Theorie erzielte Alexandre-Théophile Vandermonde in einer 1771 vollendeten und 1776 erschienenen Arbeit zur Eliminationstheorie. Darin formulierte er einige grundlegende Aussagen über Determinanten und gilt daher als ein Begründer der Theorie der Determinante. Zu diesen Resultaten gehörte beispielsweise die Aussage, dass eine gerade Anzahl von Vertauschungen zweier benachbarter Spalten oder Zeilen das Vorzeichen der Determinante nicht ändert, wohingegen sich das Vorzeichen der Determinante bei einer ungeraden Anzahl von Vertauschungen benachbarter Spalten oder Zeilen ändert.[8]
Während seiner Untersuchungen von binären und ternären quadratischen Formen verwendete Gauß die schematische Notation einer Matrix, ohne dieses Zahlenfeld als Matrix zu bezeichnen. Dabei definierte er als Nebenprodukt seiner Untersuchungen die heutige Matrizenmultiplikation und zeigte für gewisse Spezialfälle den Determinantenproduktsatz. Augustin-Louis Cauchy systematisierte die Theorie der Determinante weiter. Er führte beispielsweise die konjugierten Elemente ein und unterschied klar zwischen den einzelnen Elementen der Determinante beziehungsweise zwischen den Unterdeterminanten verschiedener Ordnung. Außerdem formulierte und bewies er Sätze über Determinanten wie zum Beispiel den Determinantenproduktsatz oder dessen Verallgemeinerung, die Formel von Binet-Cauchy. Außerdem trug er wesentlich dazu bei, dass sich der Begriff „Determinante“ für diese Abbildung durchsetzte. Daher kann insgesamt auch Augustin-Louis Cauchy als Begründer der Theorie der Determinante angesehen werden.[8]
Die axiomatische Behandlung der Determinante als Funktion von unabhängigen Variablen gab als erster Karl Weierstraß in seinen Berliner Vorlesungen (spätestens ab dem Jahre 1864 und möglicherweise schon davor), an die dann Ferdinand Georg Frobenius in seinen Berliner Vorlesungen des Sommersemesters 1874 anknüpfte und dabei unter anderem und vermutlich als erster den laplaceschen Entwicklungssatz systematisch auf diese Axiomatik zurückführte.[2]
Weblinks
BearbeitenEinzelnachweise
Bearbeiten- ↑ Gerd Fischer: Lineare Algebra. 15., verbesserte Auflage. Vieweg Verlag, Wiesbaden 2005, ISBN 3-8348-0031-7, S. 178.
- ↑ a b Ferdinand Georg Frobenius: Zur Theorie der linearen Gleichungen. In: J. Reine Ang. Math. (Crelles Journal). Band 129, 1905, S. 179–180.
- ↑ Günter Pickert: Analytische Geometrie. 6., durchgesehene Auflage. Akademische Verlagsgesellschaft, Leipzig 1967, S. 130.
- ↑ Christoph Ableitinger, Angela Herrmann: Lernen aus Musterlösungen zur Analysis und Linearen Algebra. Ein Arbeits- und Übungsbuch. 1. Auflage. Vieweg + Teubner, Wiesbaden 2011, ISBN 978-3-8348-1724-2, S. 114.
- ↑ Matrix Reference Manual.
- ↑ John R. Silvester: Determinants of Block Matrices. In: The Mathematical Gazette. Bd. 84, Nr. 501 (November 2000), S. 460–467, (PDF; 152 kB). ( vom 10. Juni 2009 im Internet Archive). Bei: mth.kcl.ac.uk.
- ↑ Eberhard Knobloch: Erste europäische Determinantentheorie. In: Erwin Stein, Albert Heinekamp (Hrsg.): Gottfried Wilhelm Leibniz – Das Wirken des großen Philosophen und Universalgelehrten als Mathematiker, Physiker, Techniker. Gottfried-Wilhelm-Leibniz-Gesellschaft, Hannover 1990, S. 32–41. ISBN 3-9800978-4-6.
- ↑ a b c d Heinz-Wilhelm Alten: 4000 Jahre Algebra. Geschichte, Kulturen, Menschen. Springer, Berlin u. a. 2003, ISBN 3-540-43554-9, S. 335–339.